一、源码
mod_filter.c源码
/*
文件功能:
提供不同的滤波函数
用法介绍:
1.定义相关滤波函数的结构体
2.使用对应函数进行数据处理
作者:
春风催雪
更新记录:
2022-1-17>>V0.1:初次整理
*/
#include "include.h"
/*
描述:对数据进行均值滤波
pAverage:均值滤波相关数据结构体指针,详细参考AVERAGEPARAM
Input:实际输入值
返回:滤波后的输出值
注意:均值滤波长度要在200以内,且需要考虑数据总和不能超过int32_t
*/
int32_t Mod_Filter_Average(AVERAGEPARAM *pAverage, int32_t Input)
{
uint8_t i;
if((pAverage->Length < 1) || (pAverage->Length > 200)) //超长退出
{
return 0;
}
if(pAverage->OnceTF == 0) //初次进入
{
pAverage->OnceTF = 1;
pAverage->DatPos = 0;
for(i=0; i<pAverage->Length; i++)
{
pAverage->pDat[i] = Input;
}
pAverage->Sum = Input * pAverage->Length;
return Input;
}
pAverage->Sum -= pAverage->pDat[pAverage->DatPos];
pAverage->pDat[pAverage->DatPos] = Input;
pAverage->Sum += pAverage->pDat[pAverage->DatPos];
pAverage->DatPos++;
if(pAverage->DatPos >= pAverage->Length)
{
pAverage->DatPos = 0;
}
return (pAverage->Sum / pAverage->Length);
}
/*
描述:对数据进行RC滤波
pResCop:RC滤波相关数据结构体指针,详细参考RESCOPPARAM
Input:实际输入值
返回:滤波后的输出值
注意:此函数中的k,代表旧新数据比为k:(1000-k),使用时需要考虑数据超长(int32_t),
另需注意,输入值单步跳动较小时,会因为单片机的舍余运算,导致滤波结果和实际数据一直保存偏差
*/
int32_t Mod_Filter_ResCop(RESCOPPARAM *pResCop, int32_t Input)
{
if(pResCop->K > 999)
{
return 0;
}
if(pResCop->OnceTF == 0)
{
pResCop->OnceTF = 1;
pResCop->DatLog = Input;
return Input;
}
pResCop->DatLog = (pResCop->DatLog * pResCop->K + Input * (1000 - pResCop->K)) / 1000;
return pResCop->DatLog;
}
/*
描述:对数据进行RC滤波,第二方式
pResCop:RC滤波相关数据结构体指针,详细参考RESCOPPARAM
Input:实际输入值
返回:滤波后的输出值
注意:此函数中的k,代表旧新数据比为k:1,最大倍率为100,使用时需要考虑数据超长(int32_t),
另需注意,输入值单步跳动较小时,会因为单片机的舍余运算,导致滤波结果和实际数据一直保存偏差
*/
int32_t Mod_Filter_ResCop_V2(RESCOPPARAM *pResCop, int32_t Input)
{
if(pResCop->K > 100)
{
return 0;
}
if(pResCop->OnceTF == 0)
{
pResCop->OnceTF = 1;
pResCop->DatLog = Input;
return Input;
}
pResCop->DatLog = (pResCop->DatLog * pResCop->K + Input) / (pResCop->K + 1);
return pResCop->DatLog;
}
/*
描述:对数据进行卡尔曼滤波
kfp:卡尔曼滤波相关数据结构体指针,详细参考KALMANPARAM
Input:实际输入值
返回:滤波后的输出值
注意:此函数采用浮点变量,使用时要考虑运算成本。
*/
float Mod_Filter_Kalman(KALMANPARAM *kfp,float input)
{
//预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差
kfp->Now_P = kfp->Last_P + kfp->Q;
//卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差)
kfp->Kg = kfp->Now_P / (kfp->Now_P + kfp->R);
//更新最优值方程:k时刻状态变量的最优值 = 状态变量的预测值 + 卡尔曼增益 * (测量值 - 状态变量的预测值)
kfp->out = kfp->out + kfp->Kg * (input - kfp->out);//因为这一次的预测值就是上一次的输出值
//更新协方差方程: 本次的系统协方差付给 kfp->LastP 威下一次运算准备。
kfp->Last_P = (1-kfp->Kg) * kfp->Now_P;
return kfp->out;
}
/*
描述:延迟一个数据周期,对数据进行剔除处理
pScreen:剔除功能相关数据结构体指针,详细参考SCREENPARAM
Input:实际输入值
返回:若数据正常,返回第二个数据,若数据不正常,返回第三个数据
*/
int32_t Mod_Filter_Screen(SCREENPARAM *pScreen, int32_t Input)
{
if(pScreen->OnceTF == 0)
{
pScreen->OnceTF = 1;
pScreen->Dat[2] = Input;
pScreen->Dat[1] = Input;
pScreen->Dat[0] = Input;
return Input;
}
pScreen->Dat[2] = pScreen->Dat[1];
pScreen->Dat[1] = pScreen->Dat[0];
pScreen->Dat[0] = Input;
if((pScreen->Dat[1] > pScreen->Dat[0]) && (pScreen->Dat[1] > pScreen->Dat[2]))
{
if(((pScreen->Dat[1] - pScreen->Dat[0]) > pScreen->Limit) && ((pScreen->Dat[1] - pScreen->Dat[2]) > pScreen->Limit))
{
pScreen->Dat[1] = pScreen->Dat[2];
}
}
if((pScreen->Dat[0] > pScreen->Dat[1]) && (pScreen->Dat[2] > pScreen->Dat[1]))
{
if(((pScreen->Dat[0] - pScreen->Dat[1]) > pScreen->Limit) && ((pScreen->Dat[2] - pScreen->Dat[1]) > pScreen->Limit))
{
pScreen->Dat[1] = pScreen->Dat[2];
}
}
return pScreen->Dat[1];
}
mod_filter.h源码
#ifndef __MOD_FILTER_H__
#define __MOD_FILTER_H__
typedef struct AVERAGEPARAMSTRUCT
{
int32_t *pDat; //数据指针,需要另行定义数组
uint8_t DatPos; //数据位置
int32_t Sum; //所有数据的和
uint8_t Length; //数据均值长度
uint8_t OnceTF; //初次运行标志
}AVERAGEPARAM;
typedef struct RESCOPPARAMSTRUCT
{
int32_t DatLog; //上一次的计算值
uint16_t K; //比例系数1~1000;
uint8_t OnceTF; //初次运行标志
}RESCOPPARAM;
typedef struct KALMANPARAMSTRUCT
{
float Last_P; //上次估算协方差
float Now_P; //当前估算协方差
float out; //卡尔曼滤波器输出
float Kg; //卡尔曼增益
float Q; //过程噪声协方差
float R; //观测噪声协方差
}KALMANPARAM;
typedef struct SCREENPARAMSTRUCT
{
int32_t Dat[3]; //数据
uint8_t OnceTF; //初次运行标志
uint32_t Limit; //剔除标准
}SCREENPARAM;
extern int32_t Mod_Filter_Average(AVERAGEPARAM *pAverage, int32_t Input);
extern int32_t Mod_Filter_ResCop(RESCOPPARAM *pResCop, int32_t Input);
extern int32_t Mod_Filter_ResCop_V2(RESCOPPARAM *pResCop, int32_t Input);
extern float Mod_Filter_Kalman(KALMANPARAM *kfp,float input);
extern int32_t Mod_Filter_Screen(SCREENPARAM *pScreen, int32_t Input);
#endif
二、总述
1、涉及到数据采集的地方,就一定会遇到干扰,遇到干扰,就会用到滤波。滤波就是把有用的信息通过,把无用的信息阻断。滤波有多种方式,每种方式都有自己的优势和劣势,每种算法也都有自己的缺陷。
2、此模块是把均值滤波,RC滤波,卡尔曼滤波(简易版),数据剔除滤波做成函数,集中放置在一起。使用的时候,需要定义对应的结构体变量并初始化,然后调用函数处理。
3、借此,博主根据自己的使用经验,大胆的分析一下各种滤波方式的差别,有不对的地方,希望能不吝赐教。
三、均值滤波(平滑滤波)
3.1、滤波原理
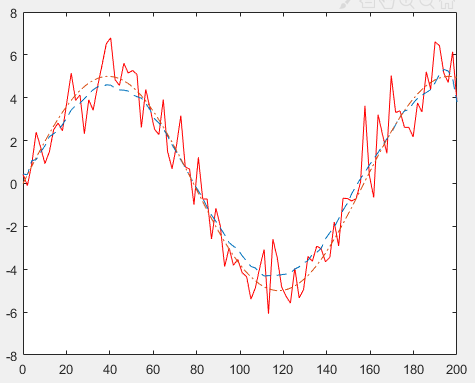
1、首先假设一种理想状态,现在有一个电压信号是两个信号的叠加(记作合成信号‘实线’),源信号是一个稳定的电压5V(‘-.-.-’),噪声是均值为0、标准差为1的正态分布的波动电压(‘—–‘)。波形图如下。
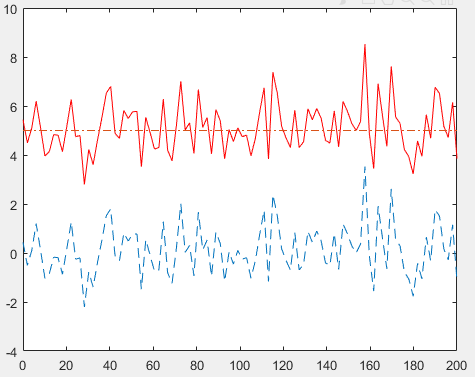
2、从波形图就能直观的看出来,合成信号实际是在源信号附近波动。如果把合成信号高出5V的部分和低出5V的部分相互抵消,就能得到一个类似源信号的波形。实际情况也是这样,由于正态分布的特性,噪声在0V左右的分布是”对称“的。对应的,合成信号在源信号附近的波动整体成”对称“的。只需要将多个采样之间进行相加求平均值,就能得到和源信号相近的结果。
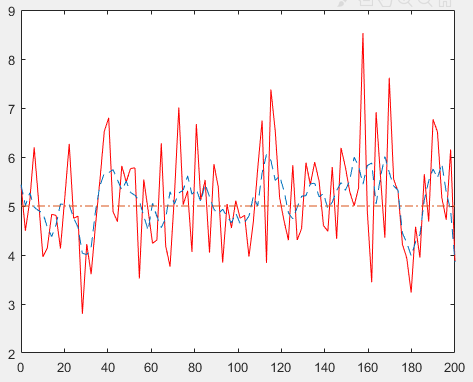
3、处理后的数据确实出现了收敛,但上图的滤波效果显然不是很理想,既然均值滤波是多个数据之间求取平均值,那均值处理的数据越多,单个数据对整体的影响就小,那么滤波强度就会越强。
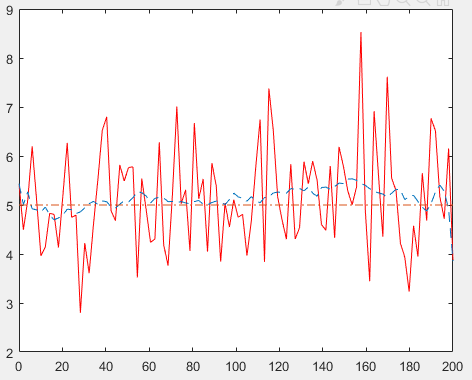
4、二十次采样做均值效果果然更加明显。但是采样是连续线性采样,而求取平均值需要将多次采样融合处理,这样就导致了数据延后。也就是计算出的结果并非当前值,而是从当前向后一段时间的整体值。如果源信号比较平稳那还好,如果源信号是波动的,势必会造成数据延后。
5、如上两图,五次采样做均值处理的时候,滤波效果较差,但是基本符合源信号。二十次采样做均值处理的时候,就和源信号相差较远了。
6、前面我们假设噪声是正态分布,实际使用中,噪声肯定不会这么配合我们。但是大多数情况下,噪声都大致对称,均值滤波的适用范围还是比较广的。
3.2、用法介绍
//首先需要定义一个结构体变量
AVERAGEPARAM AverAge_Demo;
//然后需要定义存放历史数据的数组,根据均值长度定义
int32_t Dat_Demo[20];
//对数据进行初始化
void Demo_Init(void)
{
uint8_t i;
AverAge_Demo.pDat = Dat_Demo; //数据指针
AverAge_Demo.DatPos = 0; //数据位置
AverAge_Demo.Sum = 0; //所有数据的和
AverAge_Demo.Length = 20; //数据均值长度
AverAge_Demo.OnceTF = 0; //初次运行标志
for(i=0; i<AverAge_Demo.Length; i++)
{
AverAge_Demo.pDat[i] = 0;
}
}
//实际执行
OutDat = Mod_Filter_Average(&AverAge_Demo, InDat);3.3、注意事项
1、要评估被滤波数据的大小,进而确定均值滤波的长度。AverAge_Demo.pDat指向的数据之和,不能超出int32_t类型的总和。
2、均值滤波要综合滤波效果和失真,均值处理的数据太少,滤波效果不明显,处理的数据太多,会导致数据失真。
3、博主曾经遇到过一种情况,IO读取PWM的占空比的时候,总是在平稳状态下突然来一次异常。均值滤波总是要等待这次异常逐步移动到数组的末尾,才能完全消除异常的影响。所以说,均值滤波对于非正态分布的噪声处理是很不友好的。
四、RC滤波(一阶低通滤波)
4.1、滤波原理
1、软件RC滤波的来源是硬件,那就先分析硬件上的RC滤波原理,具体的叫法,应该是一阶RC低通滤波器。
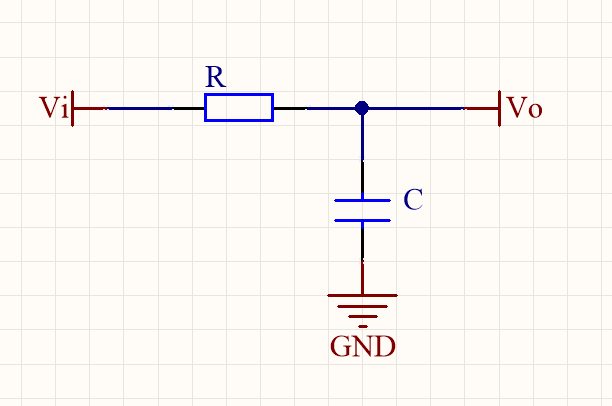
2、上图中,Vi是输入信号,经过电阻电容组成的滤波器后,输出信号Vo。先简单的从原理上进行分析,电容有一个特点就是通高频,阻低频。所以信号经过滤波器的时候,高频信号被导向地,低频信号则能被Vo检测到。
3、从公式也能分析出来。首先电容的容抗公式是\(\frac{1}{j{\omega}C}\),j表示复数的虚部,ω表示角频率,C是电容的容值。已知电阻R,输入电压Vi,通过电阻分压,可以计算得到\[Vo=Vi\times\frac{1}{1+j{\omega}RC}\]
上式再经过转换,得到输出和输入之比,即信号增益相关公式\[H(j{\omega})=\frac{Vo}{Vi}=\frac{1}{1+j{\omega}RC}\]
再进行转换并求模,具体转换过程可以参考https://blog.csdn.net/zwc475793240/article/details/122432824
大致是分子分母同时乘一复数,将分母从复数转换为实数,再用勾股定理进行求模。\[|H(j{\omega})|=\sqrt{\frac{1}{1+({\omega}RC)^2}}\]
从公式即可看出,当角频率ω增大时,增益减弱,当角频率ω减小时,增益加强。并且从公式可以看出,信号只要讲过RC滤波器必定会有衰减,只是程度的问题。信号只要经过滤波器,也不可能完全消除掉。
一般当增益达到\(\frac{\sqrt{2}}{2}\)以下时,视为截止,又有\({\omega}=2{\pi}f\)由此可得RC滤波截止频率计算公式为\[f=\frac{1}{2{\pi}RC}\]
4、通过上述分析,我们已经知道了RC滤波器的原理和截止频率的计算公式。但是上述全部是在频域进行分析,如果想要应用到程序中,必须要有时域公式,才能列出程序算法。
首先假设电阻R分压为Vr,则有\(Vo=Vi-Vr\),假设Vo端是高阻态,则流经电阻和电容的电流相同,设为Ir。流经电容的电流又可以通过电荷和时间关系获得,即\(Ir=\frac{dq}{dt}\)。又因电容的电荷\(Q=UC\)。所以,\(Ir=C\frac{dVo}{dt}\)由此得到微分方程\[Vo=Vi-RC\frac{dVo}{dt}\]
将上式进行离散,即可得到公式\[Vo(k)=\frac{Vi(k)+\frac{RC}{{\Delta}t}Vo(k-1)}{1+\frac{RC}{{\Delta}t}}\]
RC是通过截止频率计算得到的常量,Δt对应我们程序采样的周期,因此\(\frac{RC}{{\Delta}t}\)是一个常量,上式可以解释为,通过将本次采样值和上次计算值进行计算,得到本次的计算值。
当然,如果消除掉Vi(k)和Vo(k-1)的影响,就能很清晰的看到,RC滤波就是从上次的输出值和本次采样值之间取不同信任度,而输出一个新的输出值。
4.2、用法介绍
//首先需要定义一个结构体变量
RESCOPPARAM ResCop_Demo;
//对数据进行初始化
void Demo_Init(void)
{
ResCop_Demo.DatLog = 0; //上一次的计算值
ResCop_Demo.K = 10; //比例系数1~1000,即RC/Δt;
ResCop_Demo.OnceTF = 0; //初次运行标志
}
//实际执行
OutDat = Mod_Filter_ResCop_V2(&ResCop_Demo, InDat);
//或者使用变格式的函数,具体可以参考源代码,此时的K已经不代表RC/Δt了
OutDat = Mod_Filter_ResCop(&ResCop_Demo, InDat);4.3、注意事项
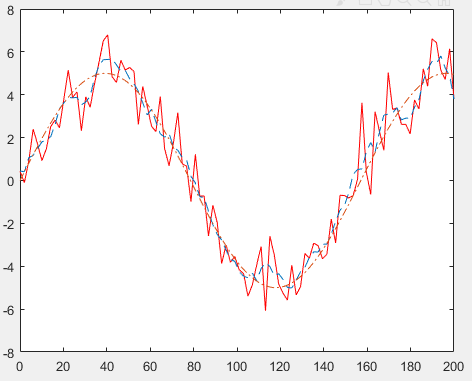
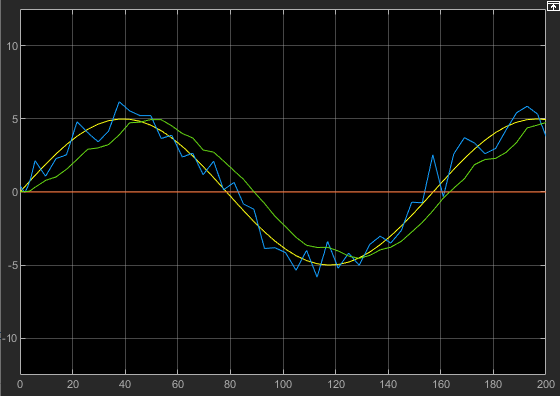
1、从公式上已经分析到,所有信号经过一阶RC低通滤波器之后,信号都会出现衰减,实际使用中应该考虑到这些。其次RC滤波有比较明显的延后性,可参考如下波形图。
2、考虑到单片机普遍运算能力吃紧,所以此函数没有采用浮点运算。使用的过程中要考虑到信号数值大小和K值的关系,K值太大,由于单片机的舍余运算,会导致计算值一直无法达到实际值。此时可以将采集到的数据进行放大,计算之后再进行缩小。
持续更新中。。。